Kanadský teenager vytváří AI robotickou želvu, aby chránila oceány
Studenti z města Burlington v jihovýchodní Kanadě, který se jmenoval Evan Budz, byl svými rodiči vyzván, aby opustil každé místo, které navštíví, o něco lépe, než je našel, a bylo mu 15 let, když se při sledování plavající se želvy nechal inspirovat biomimetikou.
Jev, ke kterému dochází, když při analýze živého organismu izolujete jeho funkční princip, abyste pomocí této logiky něco vytvořili, vedl studenta k intuitivnímu vytvoření výzkumné otázky: Co kdyby robot dokázal napodobit tyto pohyby, aniž by narušil život kolem sebe?
Evan, vychovaný na principech Leave No Trace, filozofii turistů, kajakářů a outdoorsmanů, proměnil své pozorování v projekt. Tak se zrodil BURT, iniciály v angličtině pro Bionic Underwater Robotic Turtle, autonomní zařízení.
Replika přirozené kinematiky mořských želv byla také kritizována: „Většina současných podvodních technologií produkuje věci jako hluk z jejich lodních šroubů nebo vodních proudů při velmi vysokém tlaku“, což může korodovat prostředí, řekl mladý vynálezce webu PopSci.
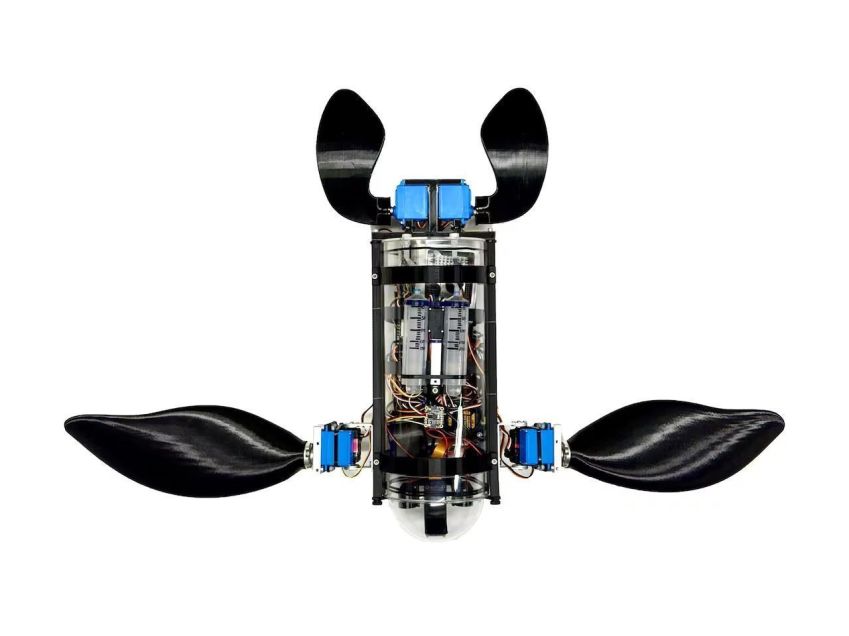
Elegantní a efektivní robot má čtyři ploutve: přední, větší, pro pohon; ty zadní, menší, pro stabilitu a změnu směru — stejně jako skutečné želvy. Hlavním tělem je akrylová trubice, ve které jsou umístěny elektronické součástky.
Jak funguje bionická podvodní robotická želva BURT?
Přestože si zachovává stejné tělesné proporce jako skutečný vodní plaz, měřítko BURT bylo zmenšeno, aby se usnadnila navigace v různých prostředích. Zařízení váží kolem pěti kilogramů.
V mozku biorobota zpracovává mikropočítač Raspberry Pi modely umělé inteligence, zaznamenává data a přenáší je. Externí senzory zahrnují GPS pro předdefinovanou navigaci na mřížce, přední kameru a detektory hrozeb, jako jsou mikroplasty a bělené korály.
Velkou výzvou bylo integrovat lithiovou baterii do podvodního zařízenícož vyžadovalo řešení problémů s těsněním, energetickým managementem a integrací systémů. Výsledek ale stál za to: až osm hodin nepřetržitého provozu, rozšířeného o solární panel, se standardní rychlostí 0,8 km/h — stejně jako skutečná želva.
Aby trénoval BURTovu vizi, Evan postavil simulované korálové útesy s 3D modely. Při testování přístroj dosáhl 96% přesnosti při detekci umělého bělení. Nedávno student začlenil holografické zařízení a neuronovou síť k identifikaci mikroplastů ve vodě.
Ocenění a vyhlídky pro robotickou želvu

Vynález vynesl kanadskému studentovi první místo v soutěži Evropské unie pro mladé vědce, která se konala v Lotyšsku v roce 2025, a titul na Canada-Wide Science Fair, národní soutěži, do které se sešlo kolem 25 tisíc účastníků.
Testy BURT byly provedeny v bazénu Budzových prarodičů a také v jezeře Ontario poblíž města, kde žije. Mezi další kroky patří přenesení robota – již řádně vybaveného předním osvětlením a ultrazvukovým snímačem detekce překážek – do hlubšího, zakaleného prostředí.
Očekává se, že flotily BURTů budou v budoucnu operovat v různých oceánechmonitorování hrozeb nad rámec již zmapovaných – bělení korálů, invazivní druhy a mikroplasty – s cílem rozšířit podvodní ekologický dohled neinvazivním způsobem.
je jeho biomimetický přístup, tedy napodobování přírody k řešení technických problémů. „Nechci ublížit různým místům, která doufám ochráním,“ shrnuje Budz v rozhovoru pro CBC Canada.